2025
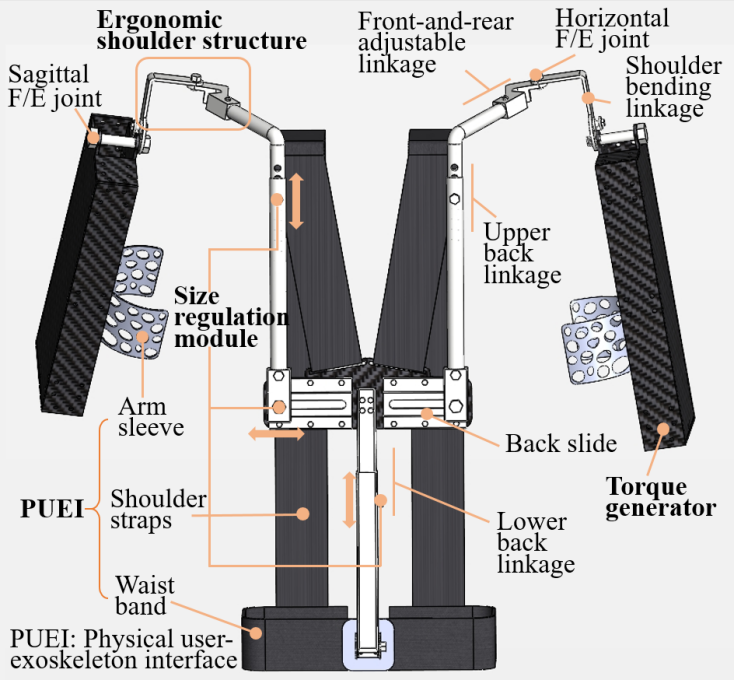
A Semi-active Occupational Shoulder Exoskeleton for Overhead Work with Free Mode and Personalized Assistive Torque
Jin. Tian, Baichun. Wei, Chifu. Yang, Haijiao. Wang, Feng. Jiang, Hong. Huang, Xiang. Li, Chunzhi. Yi# (# corresponding author)
IEEE Robotics and Automation Letter, 2025
A Semi-active Occupational Shoulder Exoskeleton for Overhead Work with Free Mode and Personalized Assistive Torque
Jin. Tian, Baichun. Wei, Chifu. Yang, Haijiao. Wang, Feng. Jiang, Hong. Huang, Xiang. Li, Chunzhi. Yi# (# corresponding author)
IEEE Robotics and Automation Letter, 2025
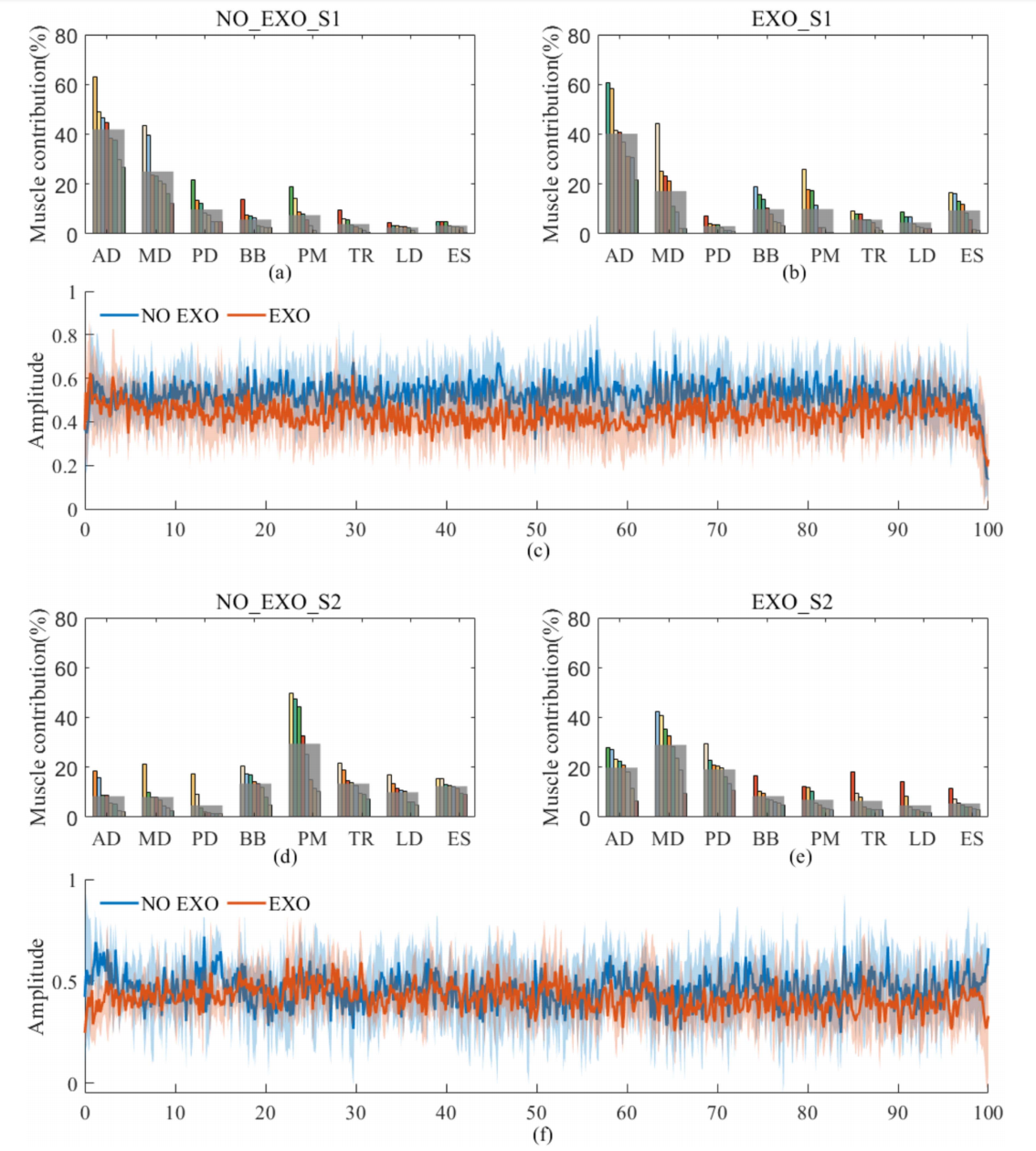
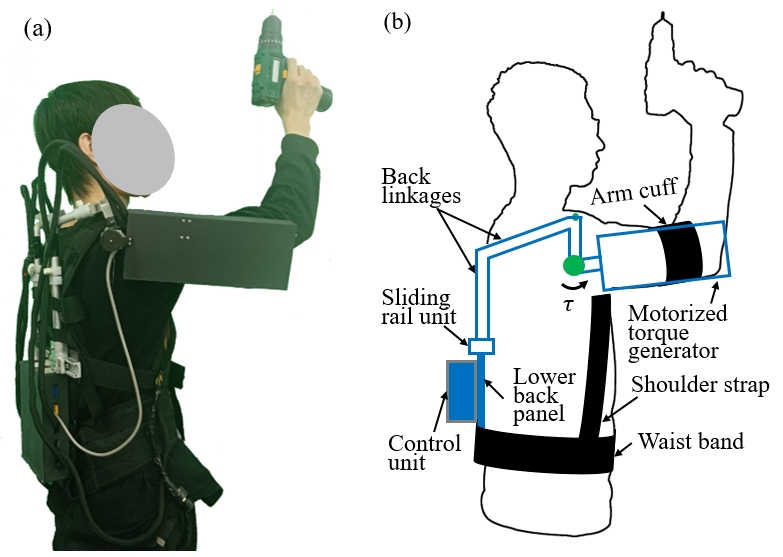
Effects of Muscle Synergy during Overhead Work with a Passive Shoulder Exoskeleton: A Case Study
Jin. Tian, Baichun. Wei, Chifu. Yang, Suo. Luo, Jiadong. Feng, Ping. Li, Changbing. Chen, Yingjie. Liu, Haiqi. Zhu, Chunzhi. Yi# (# corresponding author)
IEEE Transactions on Biomedical Engineering, 2025
Effects of Muscle Synergy during Overhead Work with a Passive Shoulder Exoskeleton: A Case Study
Jin. Tian, Baichun. Wei, Chifu. Yang, Suo. Luo, Jiadong. Feng, Ping. Li, Changbing. Chen, Yingjie. Liu, Haiqi. Zhu, Chunzhi. Yi# (# corresponding author)
IEEE Transactions on Biomedical Engineering, 2025
2024
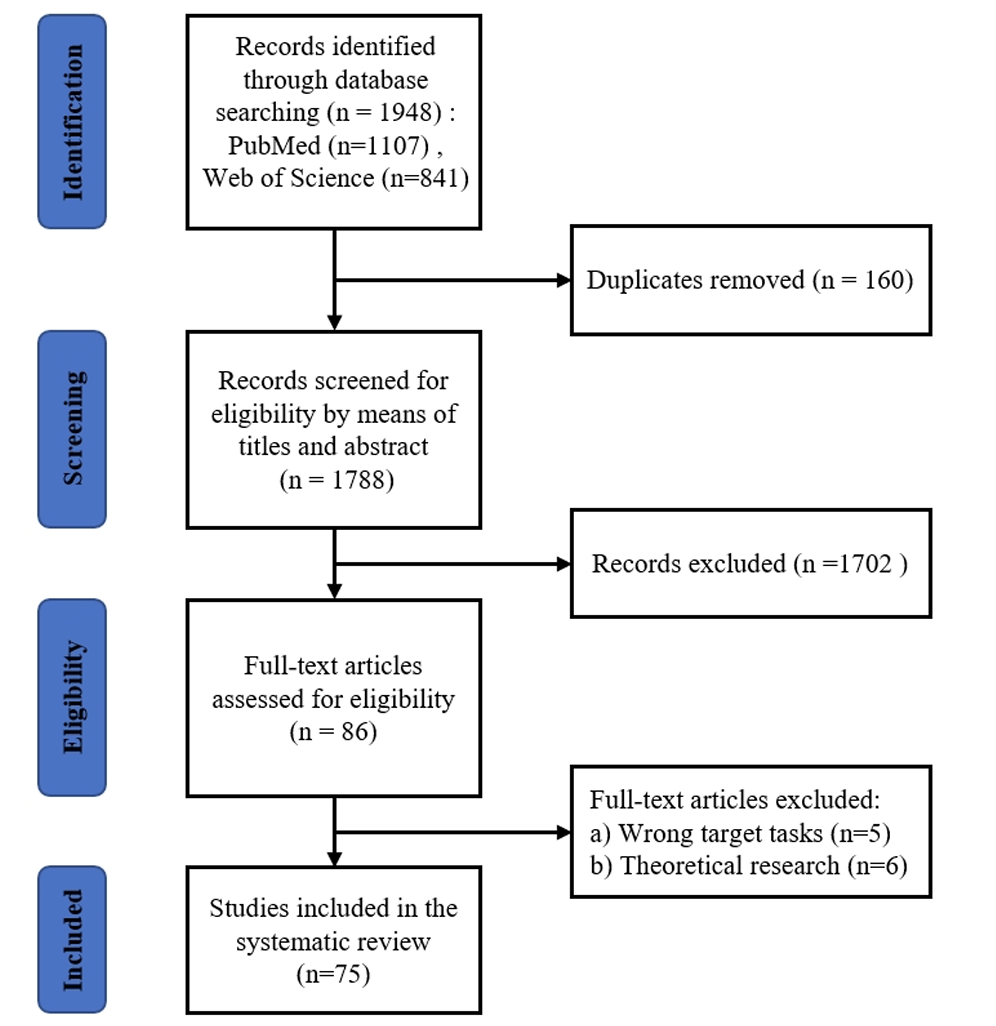
A Systematic Review of Occupational Shoulder Exoskeletons for Industrial Use: Mechanism Design, Actuators, Control, and Evaluation Aspects
Jin. Tian, Baichun. Wei, Suo. Luo, Chifu. Yang, Changbing. Chen, Yingjie. Liu, Jiadong. Feng, Ping. Li, Haiqi. Zhu, Chunzhi. Yi# (# corresponding author)
Actuators, 2024
A Systematic Review of Occupational Shoulder Exoskeletons for Industrial Use: Mechanism Design, Actuators, Control, and Evaluation Aspects
Jin. Tian, Baichun. Wei, Suo. Luo, Chifu. Yang, Changbing. Chen, Yingjie. Liu, Jiadong. Feng, Ping. Li, Haiqi. Zhu, Chunzhi. Yi# (# corresponding author)
Actuators, 2024
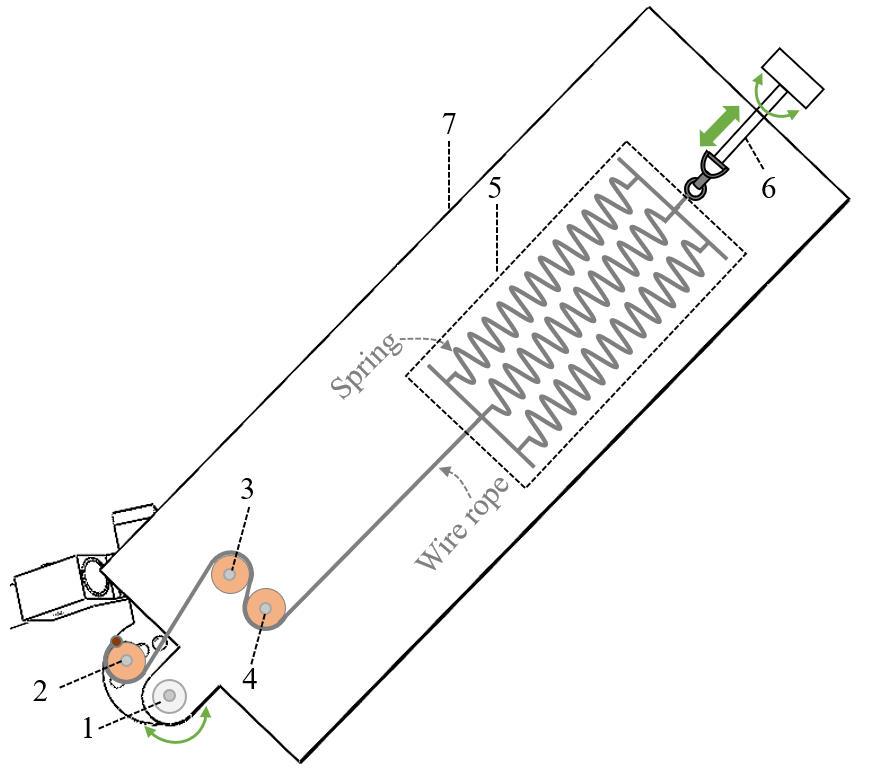
A Novel Passive Occupational Shoulder Exoskeleton With Adjustable Peak Assistive Torque Angle for Overhead Tasks
Jin. Tian, Haiqi. Zhu, Changjia. Lu, Chifu. Yang, Yingjie. Liu, Baichun. Wei, Chunzhi. Yi# (# corresponding author)
IEEE Transactions on Biomedical Engineering, 2024
A Novel Passive Occupational Shoulder Exoskeleton With Adjustable Peak Assistive Torque Angle for Overhead Tasks
Jin. Tian, Haiqi. Zhu, Changjia. Lu, Chifu. Yang, Yingjie. Liu, Baichun. Wei, Chunzhi. Yi# (# corresponding author)
IEEE Transactions on Biomedical Engineering, 2024
Design and Evaluation of a Passive Shoulder-support Exoskeleton for Overhead Work
Jin. Tian, Chifu. Yang, Feng. Jiang, Changbing. Chen, Yingjie. Liu, Chunzhi. Yi# (# corresponding author)
2024 39th Youth Academic Annual Conference of Chinese Association of Automation (YAC), Dalian, China, 2024
Design and Evaluation of a Passive Shoulder-support Exoskeleton for Overhead Work
Jin. Tian, Chifu. Yang, Feng. Jiang, Changbing. Chen, Yingjie. Liu, Chunzhi. Yi# (# corresponding author)
2024 39th Youth Academic Annual Conference of Chinese Association of Automation (YAC), Dalian, China, 2024
2022
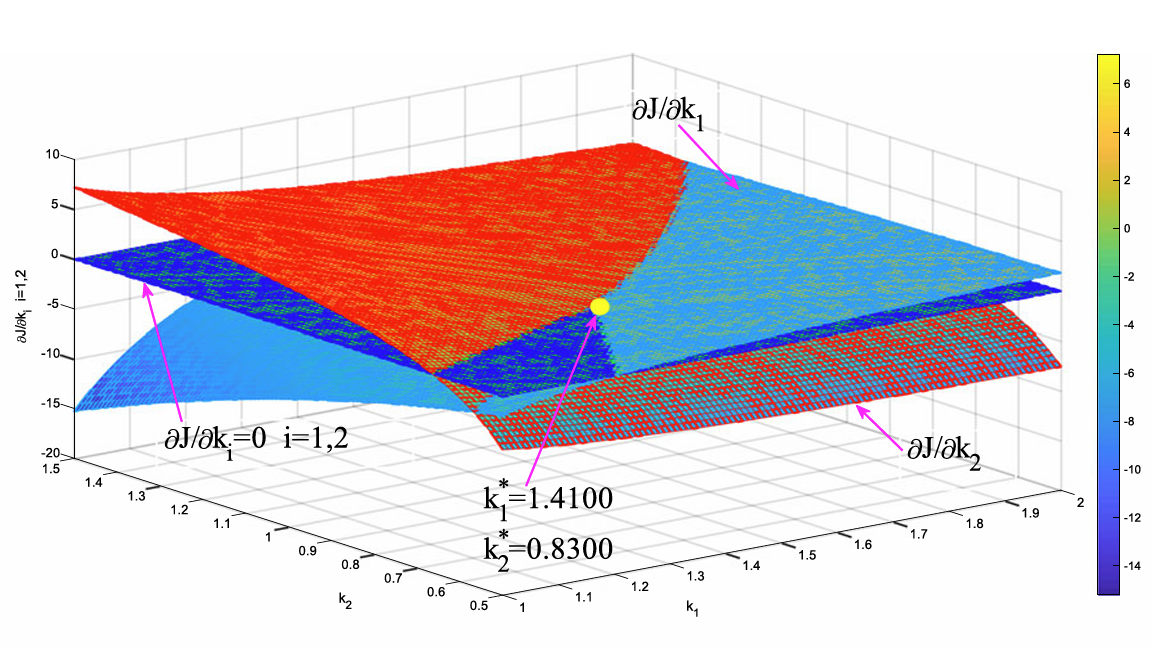
Optimal robust control with cooperative game theory for lower limb exoskeleton robot
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Jianbo. Zhang, Li. He (# corresponding author)
Nonlinear Dynamics, 2022
Optimal robust control with cooperative game theory for lower limb exoskeleton robot
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Jianbo. Zhang, Li. He (# corresponding author)
Nonlinear Dynamics, 2022
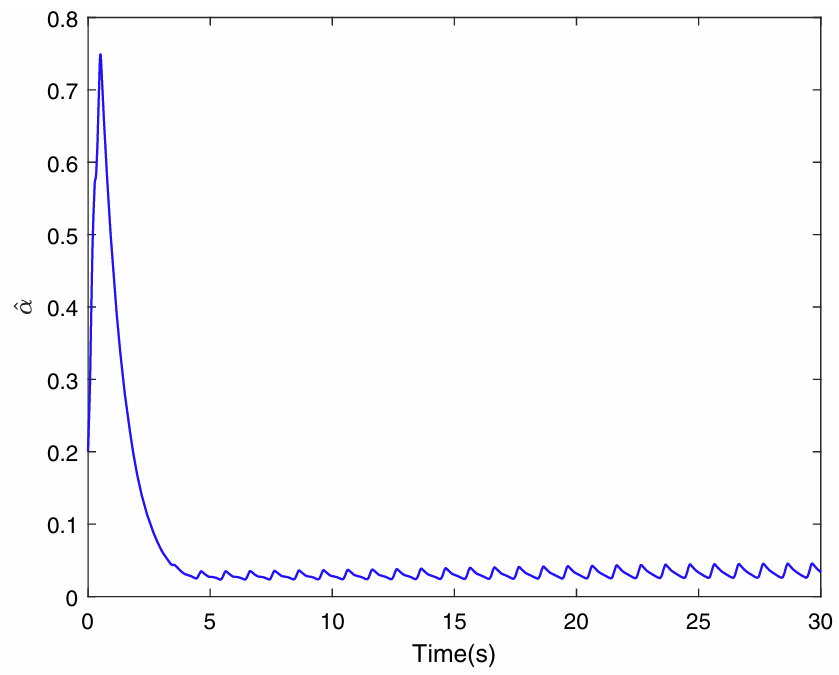
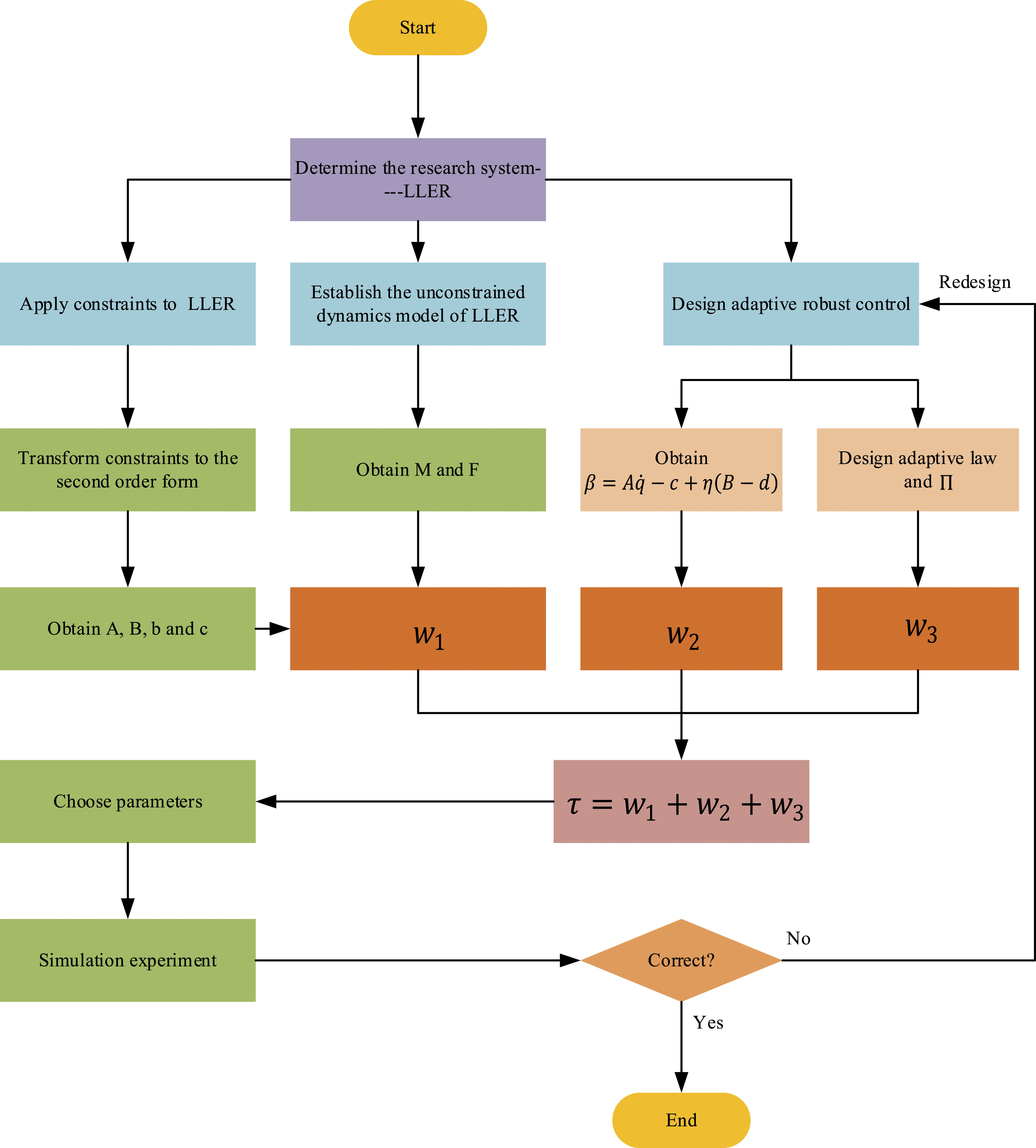
Constrained control methods for lower extremity rehabilitation exoskeleton robot considering unknown perturbations
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Jianbo. Zhang, Li. He (# corresponding author)
Nonlinear Dynamics, 2022
Constrained control methods for lower extremity rehabilitation exoskeleton robot considering unknown perturbations
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Jianbo. Zhang, Li. He (# corresponding author)
Nonlinear Dynamics, 2022
2021
Trajectory following control of lower limb exoskeleton robot based on Udwadia–Kalaba theory
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Li. He (# corresponding author)
Journal of Vibration and Control, 2021
Trajectory following control of lower limb exoskeleton robot based on Udwadia–Kalaba theory
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Li. He (# corresponding author)
Journal of Vibration and Control, 2021