.")
Wearable assistive robotics
Harbin Institute of Technology
Jin Tian is currently pursuing a Ph.D. degree in mechanical engineering at the School of Mechatronics Engineering, Harbin Institute of Technology, Harbin, China. His research interests include wearable robotics, assistive technology, and human-machine interaction. He has done a wide range of work on design and control of exoskeletons, with the goal of developing wearable robotic systems that enhance the ability and quality of human lives.
Education
-
 Technical University of MunichVisiting Ph.D. StudentOct. 2025 - present
Technical University of MunichVisiting Ph.D. StudentOct. 2025 - present -
 Harbin Institute of TechnologyPh.D. in Mechanical EngineeringSep. 2022 - present
Harbin Institute of TechnologyPh.D. in Mechanical EngineeringSep. 2022 - present -
 Xinjiang UniversityM.S. in Mechanical EngineeringSep. 2019 - Jul. 2022
Xinjiang UniversityM.S. in Mechanical EngineeringSep. 2019 - Jul. 2022 -
 Hunan University of Science and TechnologyB.S. in Mechanical EngineeringSep. 2015 - Jul. 2019
Hunan University of Science and TechnologyB.S. in Mechanical EngineeringSep. 2015 - Jul. 2019
Honors & Awards
-
CSC Scholarship2025
-
Outstanding Graduate Student, Harbin Institute of Technology2023
-
Provincial Excellent Master's Thesis, Xinjiang2022
-
Outstanding graduates and Excellent Master's Thesis, Xinjiang University2022
-
Outstanding Graduate Student, Xinjiang University2021
-
National Scholarship, Ministry of Education of the People's Republic of China2021
News
Selected Publications (view all )
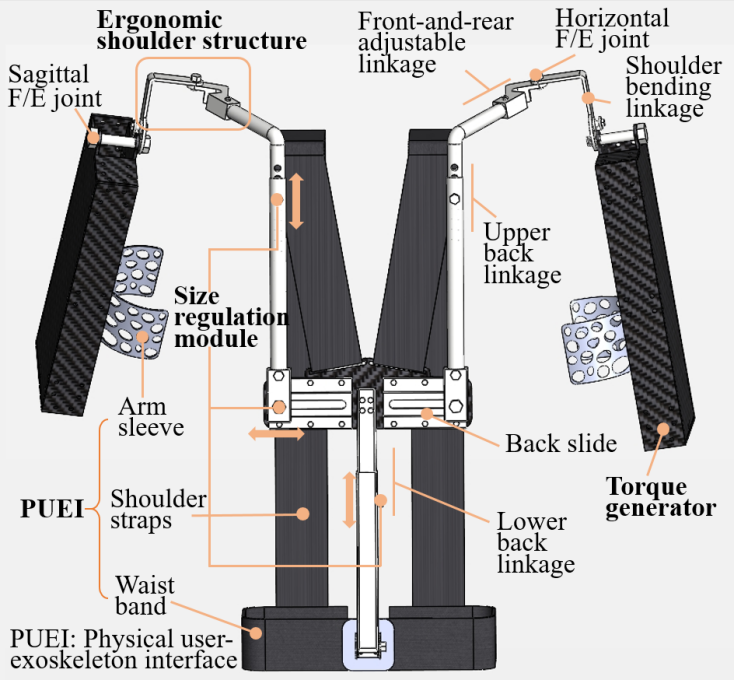
A Novel Passive Occupational Shoulder Exoskeleton With Adjustable Peak Assistive Torque Angle for Overhead Tasks
Jin. Tian, Haiqi. Zhu, Changjia. Lu, Chifu. Yang, Yingjie. Liu, Baichun. Wei, Chunzhi. Yi# (# corresponding author)
IEEE Transactions on Biomedical Engineering, 2024
A Novel Passive Occupational Shoulder Exoskeleton With Adjustable Peak Assistive Torque Angle for Overhead Tasks
Jin. Tian, Haiqi. Zhu, Changjia. Lu, Chifu. Yang, Yingjie. Liu, Baichun. Wei, Chunzhi. Yi# (# corresponding author)
IEEE Transactions on Biomedical Engineering, 2024
Constrained control methods for lower extremity rehabilitation exoskeleton robot considering unknown perturbations
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Jianbo. Zhang, Li. He (# corresponding author)
Nonlinear Dynamics, 2022
Constrained control methods for lower extremity rehabilitation exoskeleton robot considering unknown perturbations
Jin. Tian, Liang. Yuan#, Wendong. Xiao, Teng. Ran, Jianbo. Zhang, Li. He (# corresponding author)
Nonlinear Dynamics, 2022